About
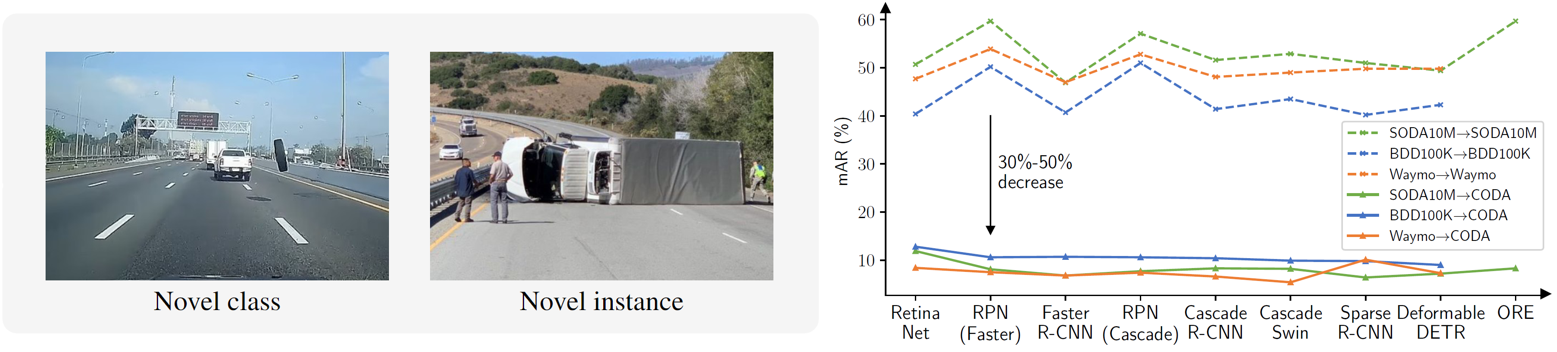
Deep learning has achieved prominent success in detecting common traffic participants (e.g., cars, pedestrians, and cyclists). Such detectors, however, are generally incapable of detecting novel objects that are not or rarely seen in the training process, generally called (object-level) corner cases, which mainly consist of two categories, namely 1) instance of novel class and 2) novel instance of common class (see an example below). Properly dealing with the corner cases has become the essential key towards reliable autonomous driving perception systems.
We introduce CODA, a novel real-world road corner case dataset for object detection in autonomous driving, consisting of ~10000 carefully selected road driving scenes with image domain tags, well-aligned lidar data and high-quality bounding box annotation for 43 representative object categories. Our CODA is constructed from major real-world object detection datasets, covering diverse driving scenes in cities of both Asia and Europe. Previous state-of-the-art object detectors trained on large-scale autonomous driving datasets suffer from a significant performance drop deployed on CODA base, suggesting that reliable object detection is still far from solved.
We hope CODA can serve as a more challenging benchmark for the community to promote reliable object detection systems in complex real-world driving circumstances. The dataset paper has been released at Arxiv and will be used to hold the ECCV2022 2nd SSLAD chanllege and the ECCV2024 Workshop on Multimodal Perception and Comprehension of Corner Cases in Autonomous Driving.
If you have any questions about CODA, please contact honglanqing@huawei.com for further help.
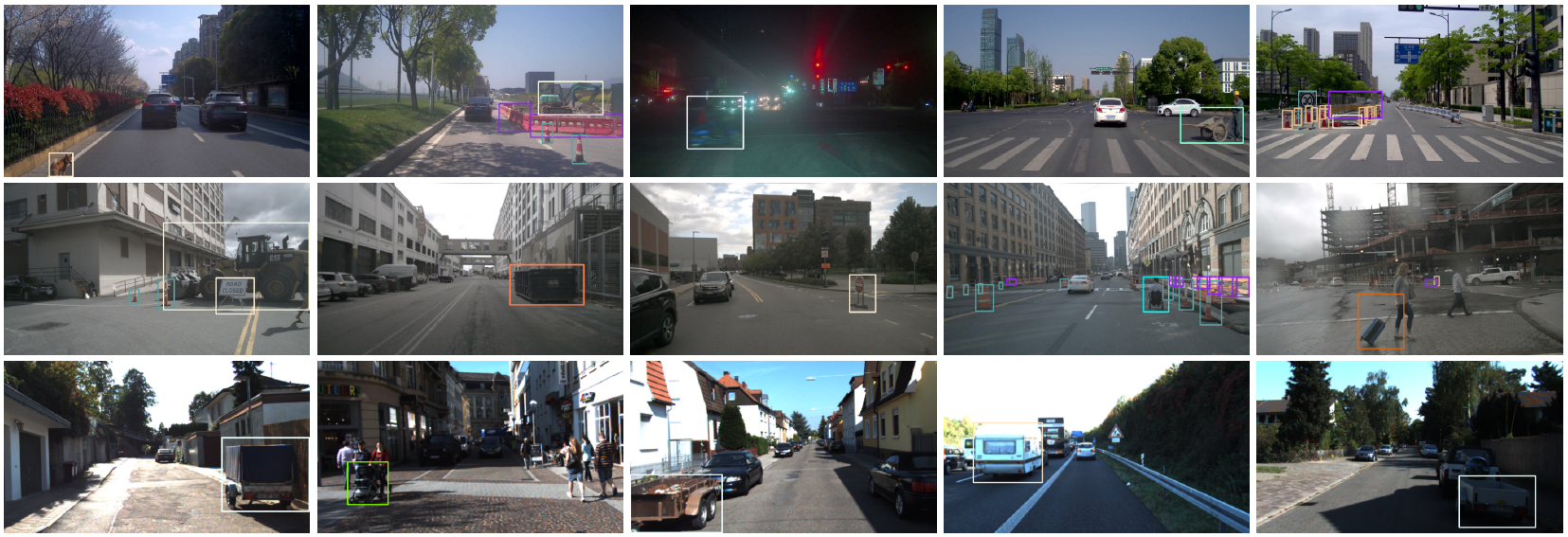
Examples
Corner cases are indicated by the bounding boxes, while each color stands for a different object class.
Annoucement
- The CODA official website has been online! (2021/11/23)
- The CODA sample set has been released! (2021/11/24)
- The CODA paper has been released on Arxiv! (2022/03/15)
- The CODA base set has been released! (2022/05/06)
- The CODA terms of use have been released! (2022/05/06)
- The CODA paper has been accepted by ECCV 2022! (2022/07/09)
- The CODA2022 val set has been released! (2022/08/01)
- The CODA2022 test set (w/o annotation) has been released! (2022/08/01)
- The SSLAD corner case detection challenge has been released on Codalab! (2022/08/01)
- The open challenge from Huawei has been released on the CODA challenge page! (2022/08/02)
- The CODA2022 test set (with annotation) has been released! (2024/02/04)
- The CODA-LM official website has been online! (2024/04/16)
- The ECCV 2024 Workshop official website has been online! (2024/05/04)
- The CODA2022 Evaluator for ECCV 2022 Workshop SSLAD Track 3 - Corner Case Detection has been released! (2024/05/24)
Citation
@article{li2022coda,
title={CODA: A Real-World Road Corner Case Dataset for Object Detection in Autonomous Driving},
author={Li, Kaican and Chen, Kai and Wang, Haoyu and Hong, Lanqing and Ye, Chaoqiang and Han, Jianhua and Chen, Yukuai and Zhang, Wei and Xu, Chunjing and Yeung, Dit-Yan and others},
journal={arXiv preprint arXiv:2203.07724},
year={2022}
}