Challenge From Huawei
We are looking for talents to solve the challenge of corner cases together! For professors in universities, we may have collaboration projects funded by Huawei to work on this problem. For students who are interested in this topic, welcome to join us as interns or employees.
Background
In recent years, autonomous driving technologies have developed rapidly due to their great potential in improving efficiency and reducing accidents. As an important module of the perception system in autonomous driving, object detection in road scenes plays an important role.
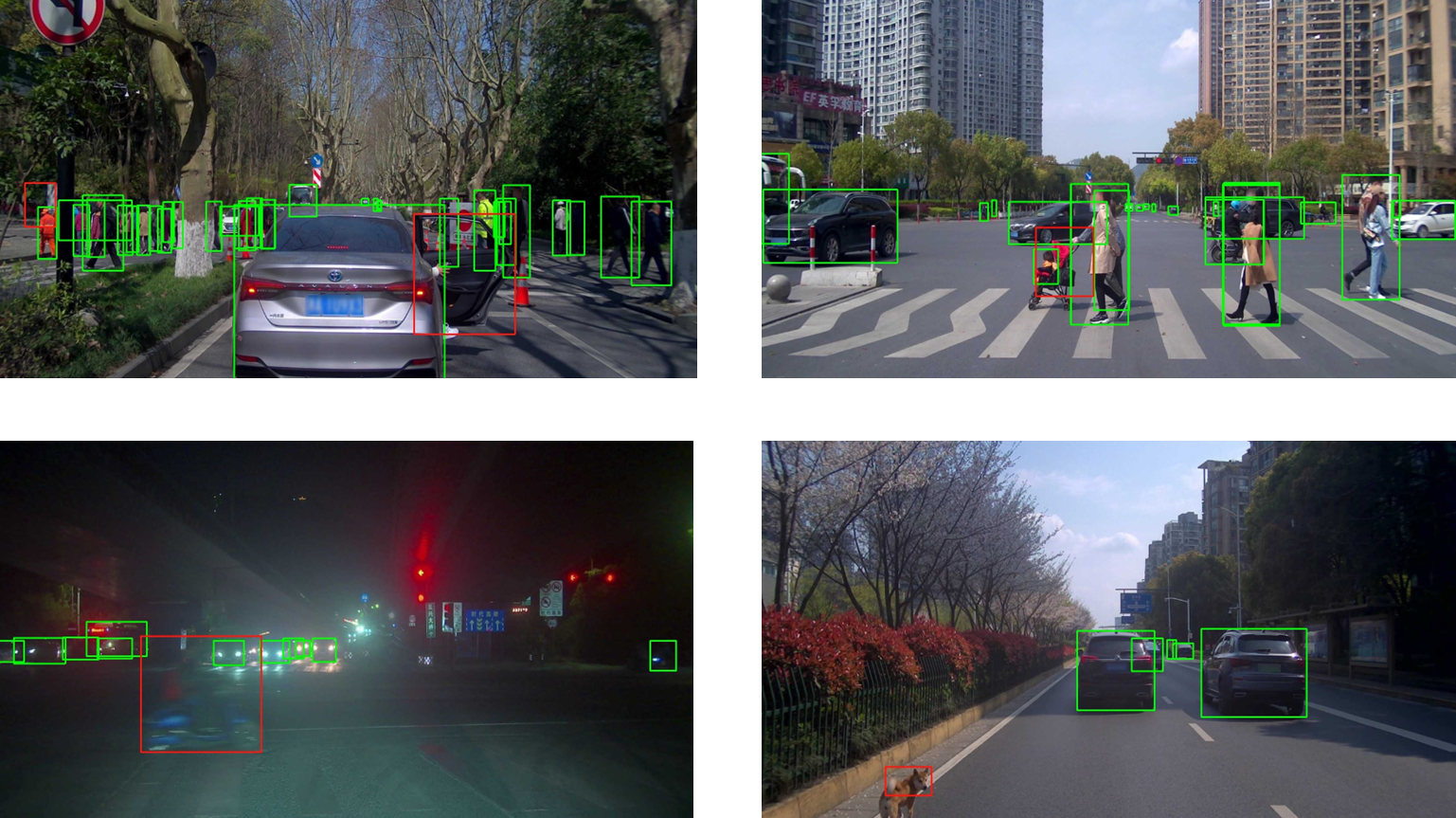
Although the current autonomous driving model achieves relatively accurate results in detecting common targets, such as pedestrians and vehicles, it is still difficult to detect corner cases, such as dogs on highways, baby strollers on roads, and overturned trucks, leading to potential safety risks.
Technical Challenges
There are various rare classes and scenarios in autonomous driving. However, there is no standard definition of what corner cases are. A corner case can be an outlier of the data, or a failure case of a specific model. It is challenging to figure out when a corner case will occur, and whether it is caused by the data or the model training process. In this case, providing solutions to corner cases are difficult.
The perception system in autonomous driving are complex, which usually involves multiple cameras, Lidar, and even Radar. How to make good use of the multimodal information to deal with the problem of corner cases is challenging.
Research Topics and Benchmarks
Understand and define corner cases in autonomous driving, analyze whether a corner case is caused by the data or the model training process, and locate the weaknesses of models;
Consider inputs such as images and videos from multiple cameras, point cloud, etc., and develop a general open-world object detection system with generalization ability, which can deal with various rare categories and scenarios;
Explore solutions for efficient locating and mining of corner cases from massive unlabeled autonomous driving road mining data.
We offer CODA, a real-world road corner case dataset for object detection in autonomous driving, for model evaluation. Please contact Dr. Lanqing Hong (honglanqing@huawei.com) for more details.